|
|
NS-3 based Named Data Networking (NDN) simulator
ndnSIM 2.5: NDN, CCN, CCNx, content centric networks
|
API Documentation |
|
|
NS-3 based Named Data Networking (NDN) simulator
ndnSIM 2.5: NDN, CCN, CCNx, content centric networks
|
API Documentation |
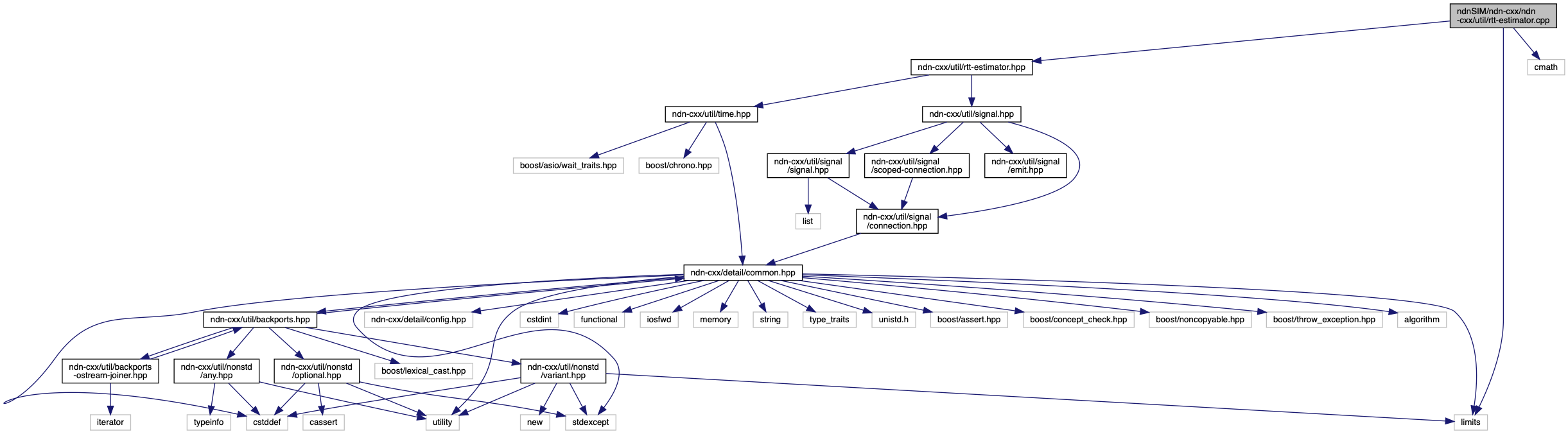
Go to the source code of this file.
Namespaces | |
| ndn | |
| Copyright (c) 2011-2015 Regents of the University of California. | |
| ndn::util | |
 1.8.15
1.8.15